Near Earth view
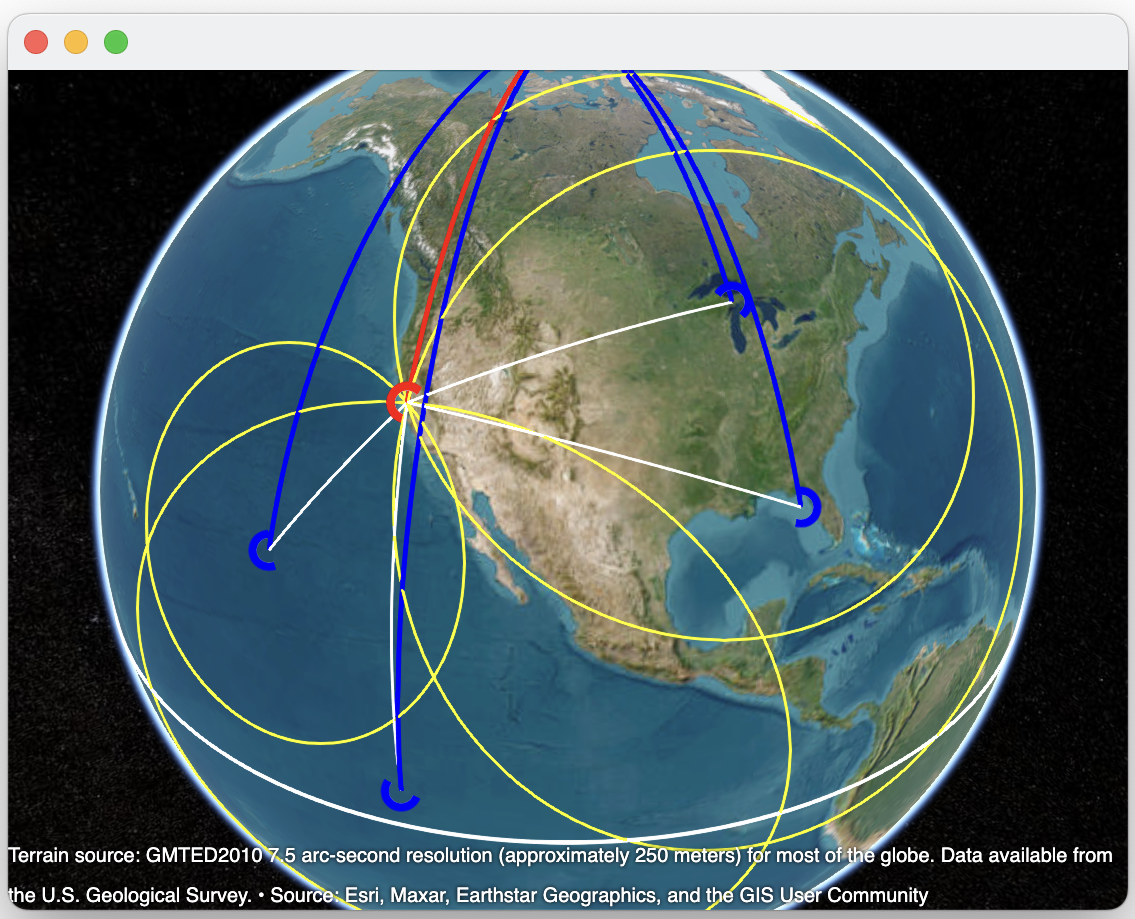
CelNav simulation from a Near Earth view with (49) bright stars of mag<2. For demonstration purposes only the very brightest stars in the sky are depicted. The star rays create Geographic Points (GP) on the Earth. Each GP has a Circle of Position (COP) where the radius is the angle to Zenith. As the Earth turns the GP move westward, resulting in continously changing COP radii. Your position is the intersection of the COP.
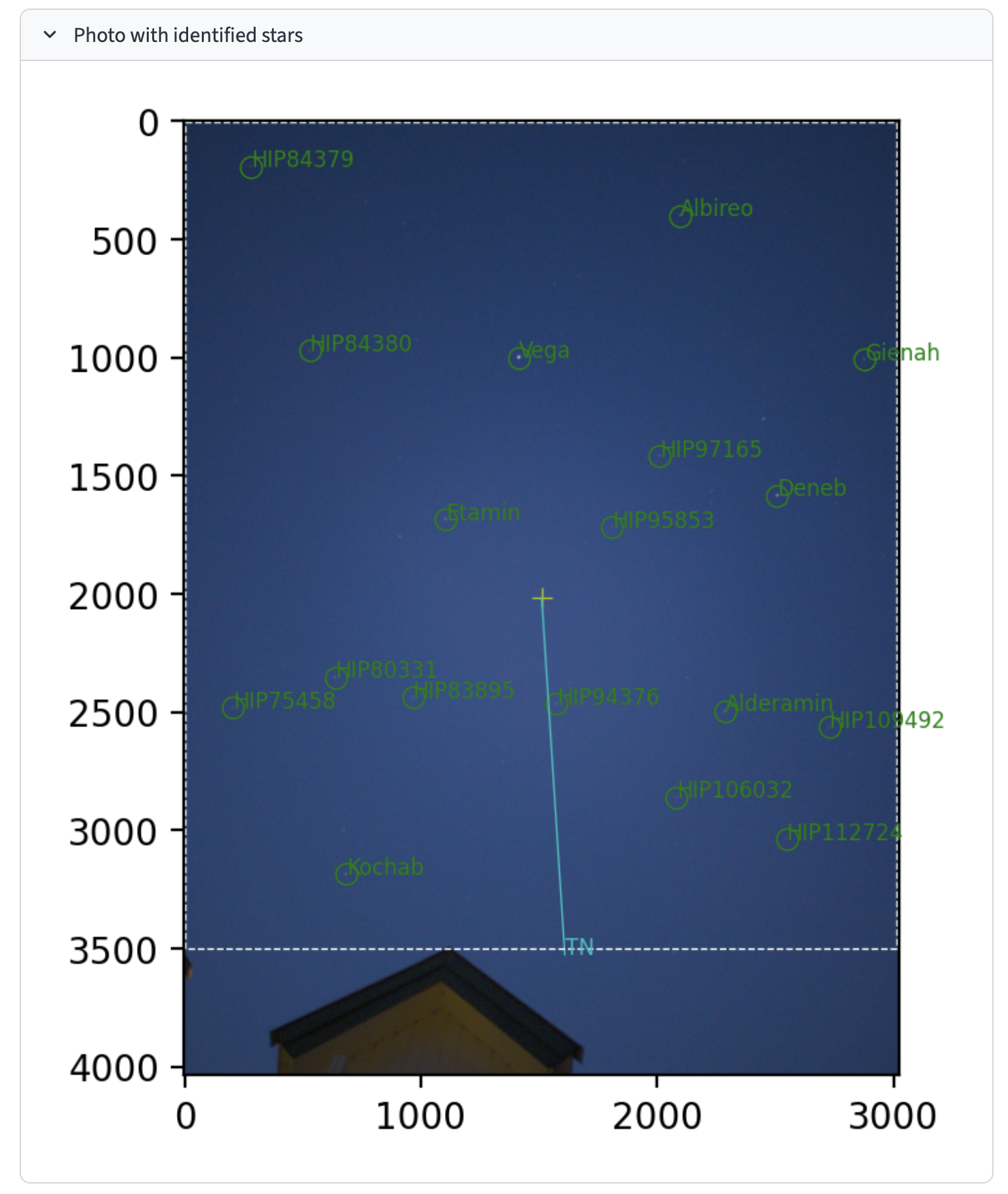
The red rays are from the 57 USNO navigation stars, while the other 118,000 stars in the Hipparcos star catalog are cyan colored. With a short 50msec exposure stars of mag<4 are easily detected. There are about 5000 such stars. At least 3 stars are needed to determine your position, but Astrofix will use all to provide a more accurate position.